Using Recreational Echosounders to Identify Zooplankton Swarms on Oregon Coast
Understanding how gray whales use nearshore foraging habitats requires not only observing their presence and behavior, but also quantifying the prey landscape they rely on in their summer foraging habitat. My current research aims to characterize the spatial structure and variability of the epibenthic zooplankton swarms using a recreational Garmin echosounder. The overarching goal is to describe the fine-scale prey field available to PCFG gray whales along the Oregon coast and to link those measurements with concurrent observations of their behavior and health collected by the GEMM Lab.
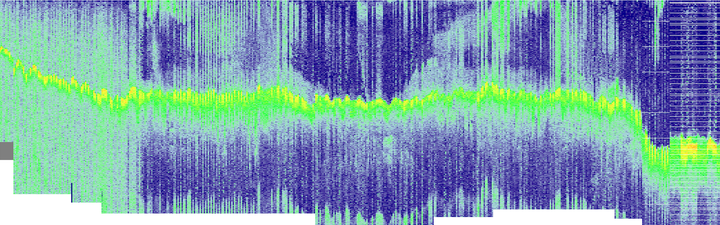
The project utilizes a vessel-mounted, single-beam, CHIRP echosounder that operates at frequencies appropriate for detecting zooplankton aggregations. As the vessel moves in the water, the echosounder emits short acoustic pulses and records backscatter intensity as a function of depth and time. These data are visualized as echograms: two-dimensional images that reveal the vertical structure of the water column, including the seafloor, suspended sediments, and biological scatterers. Zooplankton aggregations consistently produce characteristic layers or patches of elevated backscatter that allow us to infer their approximate thickness and depth. Because we don’t have calibrated, scientific equipment, we cannot infer anything about the density or absolute abundance of animals within the swarm.
A central component of the project is the development of a workflow to automate the detection and extraction of zooplankton swarms from these echograms. Because echograms are extremely large images (thousands of pixels in length), I use a sliding-window approach to generate smaller, standardized patches for analysis. These patches are paired with manually generated training masks and used to train a convolutional neural network based on a U-Net architecture. The model learns to segment the echogram into different acoustic features, most critically distinguishing the high-amplitude seafloor return from the more spatially variable zooplankton signatures.
Once the model is trained, I apply it to full survey echograms to produce spatially explicit maps of swarm distribution. From these predictions, I derive quantitative metrics such as swarm thickness, vertical position relative to the seafloor, patchiness, and within-swarm variability. These metrics provide a standardized way to compare prey availability across gray whale sightings and survey days.
An important motivation for this work is its integration with the lab’s long-term PCFG gray whale data streams. By combining acoustic prey maps with drone-based behavioral observations, we can begin to evaluate whether specific behaviors such as extended searching or foraging bouts correspond to measurable differences in prey structure on a fine scale and how measures of zooplankton relative abundance correspond to long-term variation in the body condition of individuals. Establishing these links between prey characteristics and whale behavior and health is essential for understanding habitat quality and for predicting how environmental change may influence PCFG gray whale foraging success.
Although analyses are ongoing, this project demonstrates how vessel-based acoustics can complement visual and photographic methods to provide a more complete understanding of coastal marine ecosystems. By resolving zooplankton distribution at the spatial scale relevant to individual whale foraging decisions, this work contributes a novel perspective on predator–prey dynamics in a complex, nearshore environment.